Robot Workspace Matlab

3d Data Evaluation Robot Workspace Matlab Answers Matlab Central

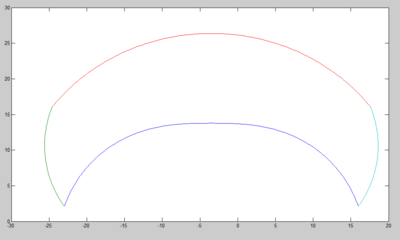
Github Happysword Rrr Robot Workspace A Simple Gui Using Matlab For Creating 2d Workspace Of Rrr Robot

A Simple Algorithm Of Robot Arm Workspace Based On Matlab Programmer Sought

Workspace Of The Manipulator Scorbot Er 4pc Robot Download Scientific Diagram

Robot Workspace Robot Academy
Https Scholar Uwindsor Ca Cgi Viewcontent Cgi Article 5808 Context Etd
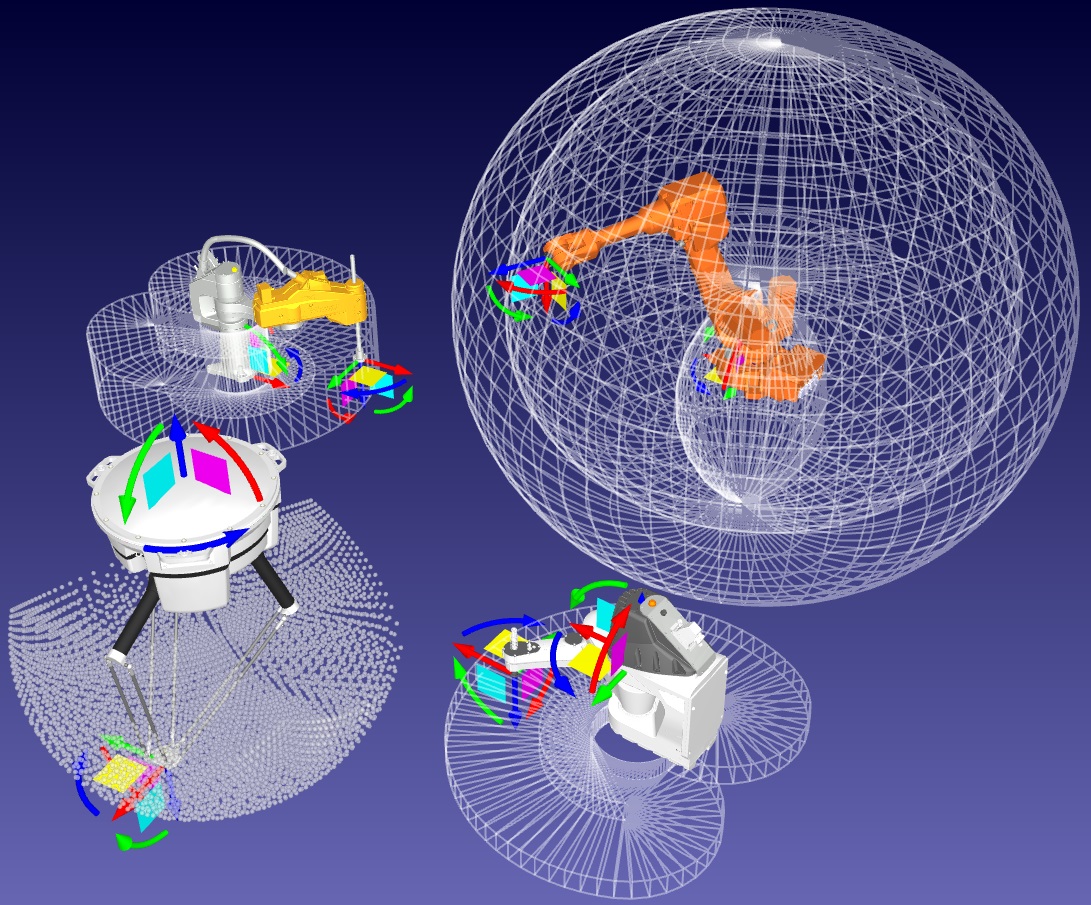
The space that the robot gripper can reach all way around visualize all the points that the robot could reach giving us a 3d space.
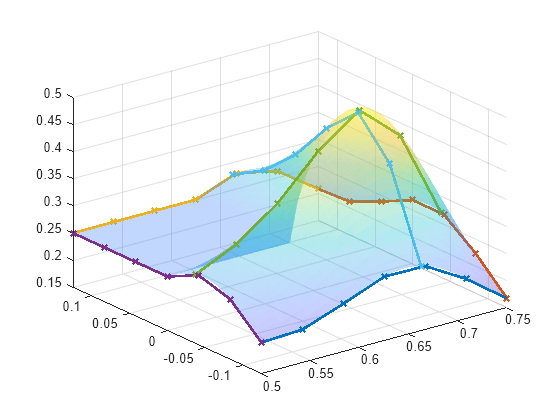
Robot workspace matlab. I could move the arm through the entire workspace on the planes i care about and plot points in a giant table of data then feed that to something like matlab and ask it to generate the best fitting outer perimeter. The dimensions of the robot and its kinematics equations define the volume of space reachable by the robot known as its workspace. I am trying to make a workspace plot representation for a 7 dof robot. The manual below is a pdf file is a printable document over 400 pages.
A really important consideration with any robot is the set of all possible points that it can reach. The method is applicable to kinematic chains that can be modeled using the denavit hartenberg representation for serial kinematic chains. The book robotics vision control second edition corke 2017 is a detailed introduction to mobile robotics navigation localization. And arm robot kinematics jacobians and dynamics illustrated using the robotics toolbox for matlab.
Matlab has a boundary method that should work pretty good. I want to plot the workspace of it from matlab. The robot has limited ranges for each joint angle and i wish to incorporate these ranges to plot a workspace representation. Or as amid said.
Ahmed abdelbasit 59 643 views. And we refer to this volume as the workspace of the robot. As of now the robot is at its datum orientation. I am using the peter corke robotics toolbox.
For most industrial robot arms in the data sheet that comes with the robot you could find the diagram that looks something like this. I have robot overlord and its ik fk solutions. Workspace which is the volume in which the robot s end effector may move. I have already done it from matlab but want to confirm my approach.
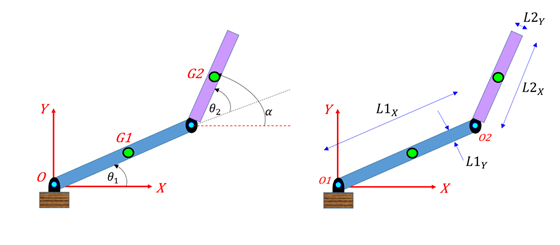
A 3 matlab code for full view of workspace a 4 matlab code for rv m1 model a 5 matlab code for machine outline figure. It is a plain view and side elevation view of the. The code below helps create that orientation. The workspace of rv m1 mitsubishi robot is determined by an analytical method.
How to create matlab gui robot arm simulation duration. It is auto generated from the comments in the matlab code and is. The code was explained in this video.
Https Arxiv Org Pdf 1707 04820

Robot Manipulator Workspaces Lecture 7a Intro2robotics Youtube

Theoretical Workspace Of 2 Dof Robotic Catheter Tip In Matlab R Download Scientific Diagram

Matlab Simulation Of 4 Ruu Parallel Manipulator Workspace Youtube

Workspace Generated By The In Vivo Robot Download Scientific Diagram

3d Puma Robot Demo File Exchange Matlab Central

Figure 9 From Structure Design And Workspace Calculation Of 6 Dof Underwater Manipulator Semantic Scholar

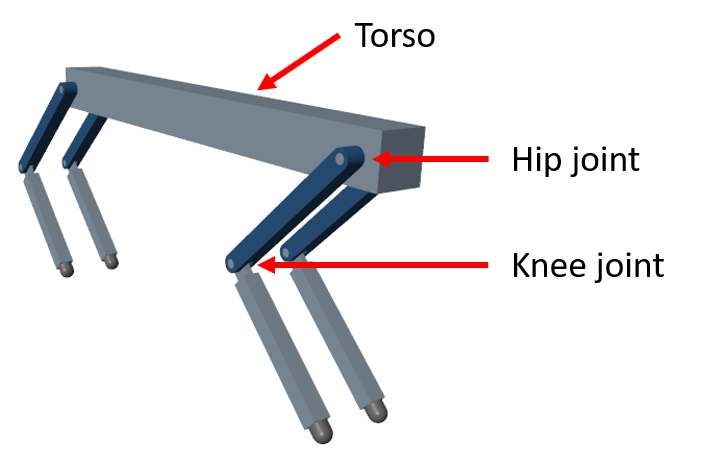
Dynamic Analysis Of Manipulator Arm For 6 Legged Robot
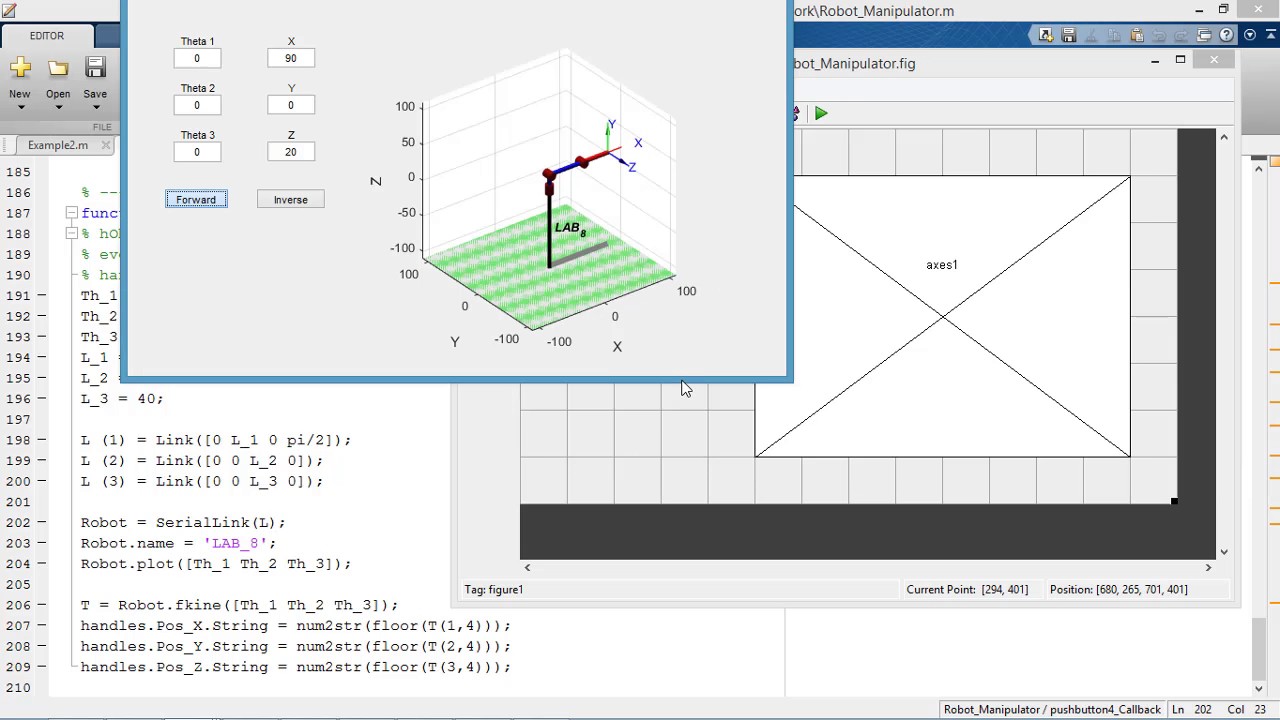
Using Peter Corke Robotics Toolbox With Matlab Gui Forward And Inverse Kinematics Youtube

Matlab Robot Simulation Code

Figure 5 From An Efficient Algorithm For Workspace Generation Of Delta Robot Semantic Scholar

Kinematic Analysis Of Humanoid Robot Hand
Matlab Tool Box For Determining The Workspace Of Mitsubishi Grin

Designing Robot Manipulator Algorithms Youtube

The Gui For Calculus Of Workspace For The Delta Linear 3 Dof Parallel Download Scientific Diagram
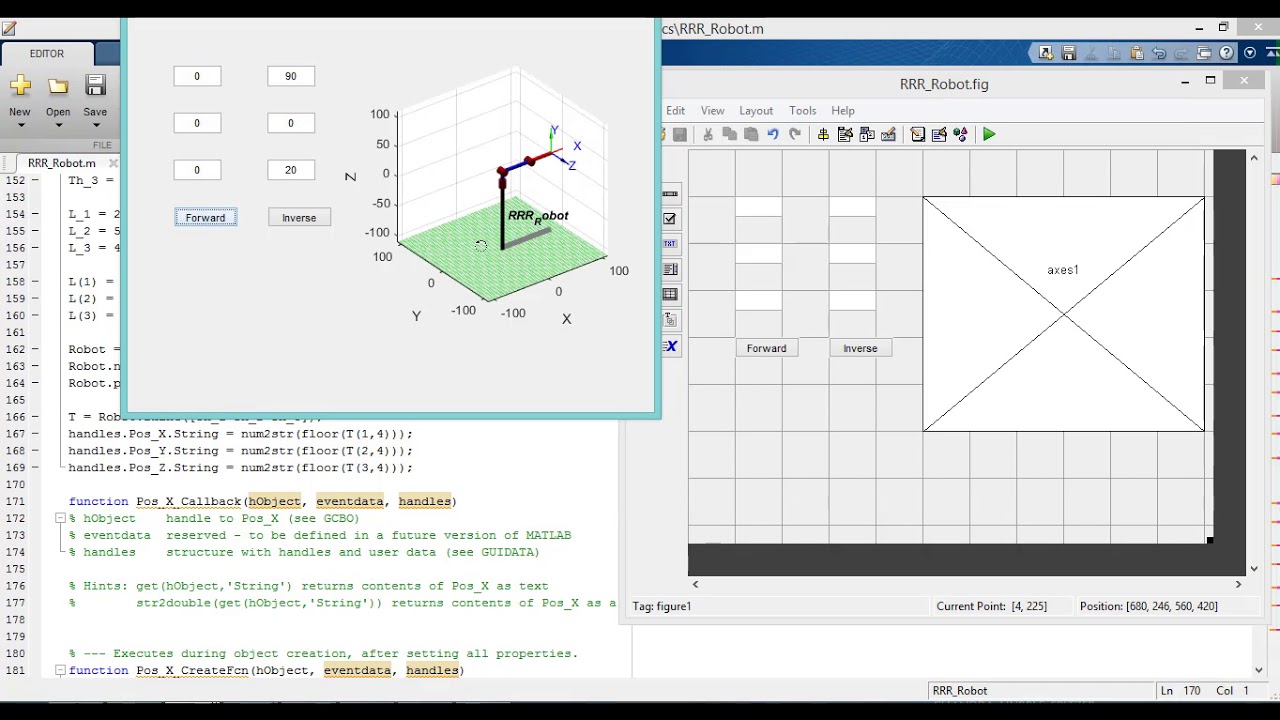
How To Create Matlab Gui Robot Arm Simulation Youtube
Design And Control Of A Pantograph Robot Northwestern Mechatronics Wiki
Workspace Of Scara Robot Download Scientific Diagram
Https Encrypted Tbn0 Gstatic Com Images Q Tbn 3aand9gcr1iupzohrslmlwimgr3bl2b Gv0xbkjhr2bpx0j7raxhql410z Usqp Cau

Workspace Of Scara Robot Ibm 7547 Download Scientific Diagram

P Corke Robotics Vision And Control Fundamental Algorithms In Matlab Springer Tracts In Advanced Robotics Pdf Free Download

Delta Parallel Robot Workspace And Dynamic Trajectory Tracking Of Delta Parallel Robot Semantic Scholar
Derive And Apply Inverse Kinematics To Two Link Robot Arm Matlab Simulink Example
Https Ijsea Com Archive Volume8 Issue8 Ijsea08081028 Pdf
Https Www Abcm Org Br Symposium Series Ssm Vol2 Section Iii Robotics Ssm2 Iii 01 Pdf

Pdf Workspace Analysis And Design Of A 6 Dof Parallel Robot

Intro2robotics Lecture 22a Path Planning Two Link Robot Arm Youtube
Quadruped Robot Locomotion Using Ddpg Agent Matlab Simulink
Off Line Programming Robodk Blog
Http Www Me Umn Edu Labs Mrd Pdfs Xia2018planbreport Visualizationandoptimizationofdynamicdelta Pdf

Cs 3630 Robotics And Perception A Great Wordpress Com Site

Robot Workspace An Overview Sciencedirect Topics

Workspace Of Abb Irb 140 Robot Download Scientific Diagram

Side And Top Views Of Robot Workspace Download Scientific Diagram

Pdf An Analytical Method To Find Workspace Of A Robotic Manipulator

Figure 2 From A New Approach For Kinematics Based Design Of 3 Rrr Delta Robots With A Specified Workspace Semantic Scholar
Http Dpi Proceedings Com Index Php Dtcse Article Viewfile 10999 10551
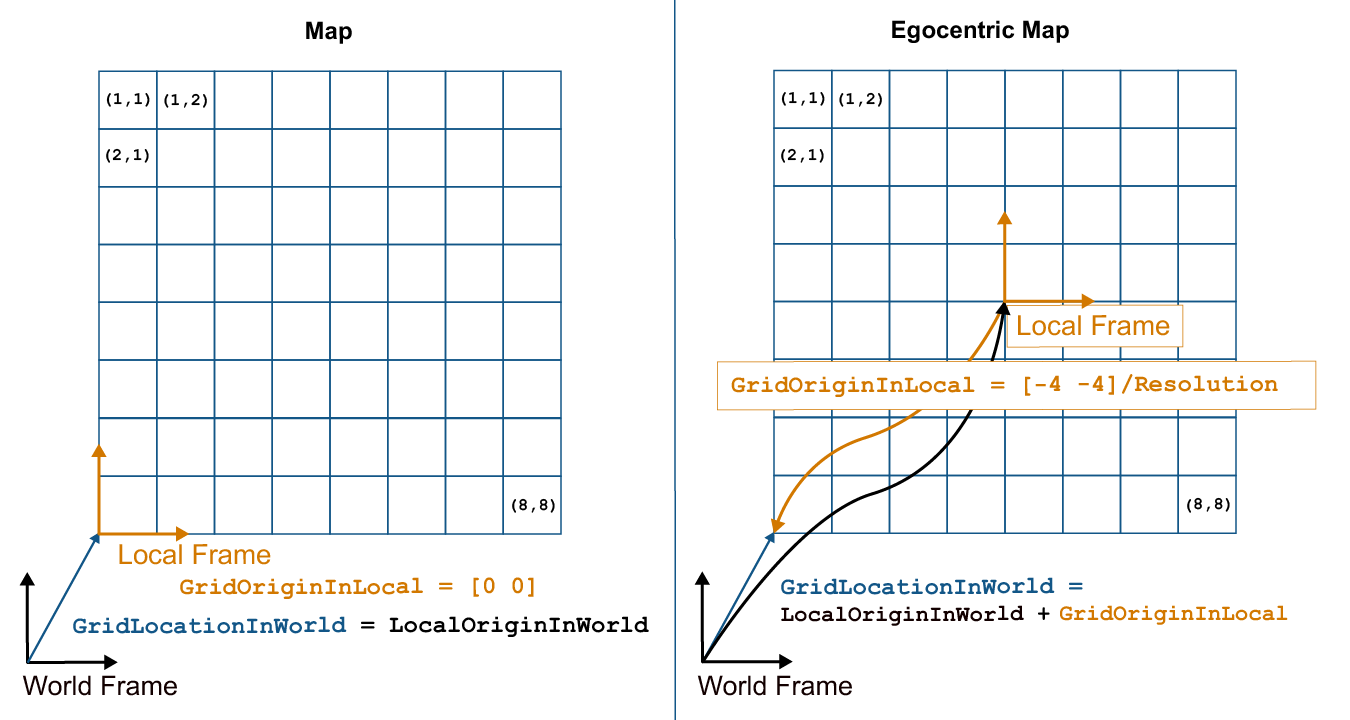
Occupancy Grids Matlab Simulink

How To Calculate The Workspace For A 7 Dof Robot Matlab Answers Matlab Central
Workspace Simulation And Analysis Of A Dual Arm Nursing Robot Springerlink
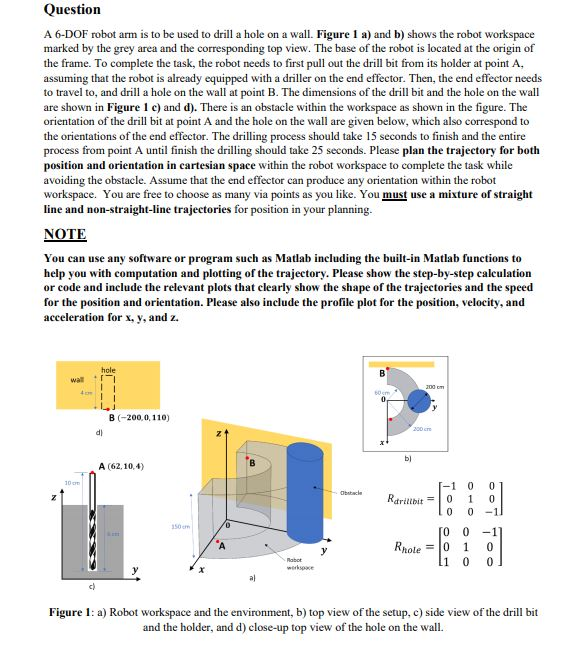
Question A 6 Dof Robot Arm Is To Be Used To Drill Chegg Com

